A class for encoding average motion in the frames. More...
#include "stir_experimental/motion/TimeFrameMotion.h"
Public Member Functions | |
| virtual Succeeded | process_data ()=0 |
| void | move_to_reference (const bool) |
| void | set_frame_num_to_process (const int) |
| int | get_frame_num_to_process () const |
| const RigidObject3DTransformation & | get_current_rigid_object_transformation () const |
| get transformation from (or to) reference for current frame | |
| const RigidObject3DTransformation & | get_rigid_object_transformation_to_reference () const |
| Get the transformation to the reference as returned by the RigidObject3DMotion object. | |
| const TimeFrameDefinitions & | get_time_frame_defs () const |
| double | get_frame_start_time (unsigned frame_num) const |
| double | get_frame_end_time (unsigned frame_num) const |
| const RigidObject3DMotion & | get_motion () const |
 Public Member Functions inherited from stir::ParsingObject Public Member Functions inherited from stir::ParsingObject | |
| ParsingObject (const ParsingObject &) | |
| ParsingObject & | operator= (const ParsingObject &) |
| bool | parse (std::istream &f) |
| bool | parse (const char *const filename) |
| void | ask_parameters () |
| virtual std::string | parameter_info () |
Protected Member Functions | |
| void | set_defaults () override |
| parsing functions | |
| void | initialise_keymap () override |
| Initialise all keywords. | |
| bool | post_processing () override |
| This will be called at the end of the parsing. | |
| virtual void | set_key_values () |
| This will be called before parsing or parameter_info is called. | |
Additional Inherited Members | |
| KeyParser | parser |
Detailed Description
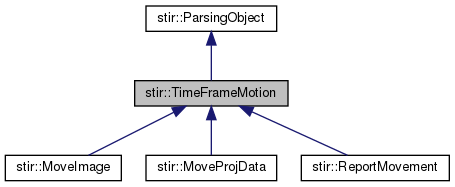
A class for encoding average motion in the frames.
- Example par file
- These are the parameters set by this class. The derived classes will add more.
; see stir::TimeFrameDefinitions time frame_definition filename := frame_definition_filename ; next parameter is optional (and not normally necessary) ; it can be used if the frame definitions are relative to another scan as what ; is used to for the rigid object motion (i.e. currently the list mode data used ; for the Polaris synchronisation) ; scan_start_time_secs_since_1970_UTC ; next parameter defines transformation 'direction', defaults to 1 ;move_to_reference := 1 ; next can be set to do only 1 frame, defaults means all frames ;frame_num_to_process := -1 ; specify motion, see stir::RigidObject3DMotion Rigid Object 3D Motion Type := type ; specify reference position, see stir::AbsTimeInterval time interval for reference position type:= type END :=
Member Function Documentation
◆ get_current_rigid_object_transformation()
| const RigidObject3DTransformation & stir::TimeFrameMotion::get_current_rigid_object_transformation | ( | ) | const |
get transformation from (or to) reference for current frame
This is computed using RigidObject3DTransformation::compute_average_motion_in_scanner_coords for the current frame.
References get_current_rigid_object_transformation().
Referenced by get_current_rigid_object_transformation().
◆ set_defaults()
|
overrideprotectedvirtual |
parsing functions
Reimplemented from stir::ParsingObject.
References set_defaults().
Referenced by stir::MoveImage::set_defaults(), stir::MoveProjData::set_defaults(), stir::ReportMovement::set_defaults(), and set_defaults().
◆ initialise_keymap()
|
overrideprotectedvirtual |
Initialise all keywords.
Reimplemented from stir::ParsingObject.
References initialise_keymap().
Referenced by stir::MoveImage::initialise_keymap(), stir::MoveProjData::initialise_keymap(), stir::ReportMovement::initialise_keymap(), and initialise_keymap().
◆ post_processing()
|
overrideprotectedvirtual |
This will be called at the end of the parsing.
- Returns
- false if everything OK, true if not
Reimplemented from stir::ParsingObject.
References stir::RigidObject3DTransformation::inverse(), post_processing(), and stir::warning().
Referenced by stir::MoveImage::post_processing(), stir::MoveProjData::post_processing(), stir::ReportMovement::post_processing(), and post_processing().
The documentation for this class was generated from the following files:
- /home/kris/devel/STIRdistrib/STIR/src/include/stir_experimental/motion/TimeFrameMotion.h
- /home/kris/devel/STIRdistrib/STIR/src/experimental/motion/TimeFrameMotion.cxx
Generated on Wed May 27 2026 17:04:07 for STIR by