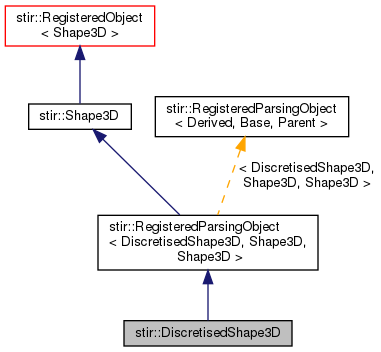
A class for shapes that have been discretised as a volume. More...
#include "stir/Shape/DiscretisedShape3D.h"
Public Member Functions | |
| DiscretisedShape3D (const VoxelsOnCartesianGrid< float > &image) | |
| Constructor that will copy the image to an internal member. | |
| DiscretisedShape3D (const shared_ptr< const DiscretisedDensity< 3, float > > &density_sptr) | |
| Constructor that will copy the shared_ptr image. | |
| bool | operator== (const Shape3D &) const override |
| Compare shapes. | |
| void | set_origin (const CartesianCoordinate3D< float > &) override |
| set origin of the shape | |
| void | scale (const CartesianCoordinate3D< float > &scale3D) override |
| Scale shape. | |
| bool | is_inside_shape (const CartesianCoordinate3D< float > &index) const override |
| determine if a point is inside a non-zero voxel or not | |
| float | get_voxel_weight (const CartesianCoordinate3D< float > &coord, const CartesianCoordinate3D< float > &voxel_size, const CartesianCoordinate3D< int > &num_samples) const override |
| get weight for a voxel centred around coord | |
| void | construct_volume (VoxelsOnCartesianGrid< float > &image, const CartesianCoordinate3D< int > &num_samples) const override |
| Construct a new image from the underlying density. | |
| Shape3D * | clone () const override |
| Allocate a new Shape3D object which is a copy of the current one. | |
| DiscretisedDensity< 3, float > & | get_discretised_density () |
| provide access to the underlying density | |
| const DiscretisedDensity< 3, float > & | get_discretised_density () const |
| provide (const) access to the underlying density | |
| int | get_label_index () const |
| Return label index. | |
| void | set_label_index (int label_index) |
| Set label index. | |
 Public Member Functions inherited from stir::RegisteredParsingObject< DiscretisedShape3D, Shape3D, Shape3D > Public Member Functions inherited from stir::RegisteredParsingObject< DiscretisedShape3D, Shape3D, Shape3D > | |
| std::string | get_registered_name () const override |
| Returns Derived::registered_name. | |
| std::string | parameter_info () override |
| Returns a string with all parameters and their values, in a form suitable for parsing again. | |
| Public Member Functions inherited from stir::Shape3D | |
| bool | operator!= (const Shape3D &) const |
| Compare shapes. | |
| virtual void | translate (const CartesianCoordinate3D< float > &direction) |
| translate the whole shape by shifting its origin | |
| void | scale_around_origin (const CartesianCoordinate3D< float > &scale3D) |
| scale the whole shape, keeping the centre at the same place | |
| virtual float | get_geometric_volume () const |
| Compute approximate volume. | |
| CartesianCoordinate3D< float > | get_origin () const |
| get the origin of the shape-coordinate system | |
| std::string | parameter_info () override |
| Public Member Functions inherited from stir::ParsingObject | |
| ParsingObject (const ParsingObject &) | |
| ParsingObject & | operator= (const ParsingObject &) |
| bool | parse (std::istream &f) |
| bool | parse (const char *const filename) |
| void | ask_parameters () |
Static Public Attributes | |
| static const char *const | registered_name = "Discretised Shape3D" |
| Name which will be used when parsing a Shape3D object. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from stir::RegisteredParsingObject< DiscretisedShape3D, Shape3D, Shape3D > | |
| static Shape3D * | read_from_stream (std::istream *) |
| Construct a new object (of type Derived) by parsing the istream. | |
| Static Public Member Functions inherited from stir::RegisteredObject< Shape3D > | |
| static Shape3D * | read_registered_object (std::istream *in, const std::string ®istered_name) |
| Construct a new object (of a type derived from Root, its actual type determined by the registered_name parameter) by parsing the istream. | |
| static Shape3D * | ask_type_and_parameters () |
| ask the user for the type, and then calls read_registered_object(0, type) | |
| static void | list_registered_names (std::ostream &stream) |
| List all possible registered names to the stream. | |
| Protected Types inherited from stir::RegisteredObject< Shape3D > | |
| typedef Shape3D *(* | RootFactory) (std::istream *) |
| The type of a root factory is a function, taking an istream* as argument, and returning a Root*. | |
| typedef FactoryRegistry< std::string, RootFactory, interfile_less > | RegistryType |
| The type of the registry. | |
| Protected Member Functions inherited from stir::Shape3D | |
| Shape3D (const CartesianCoordinate3D< float > &origin) | |
| void | set_defaults () override |
| Set defaults before parsing. | |
| void | initialise_keymap () override |
| Initialise all keywords. | |
| virtual void | set_key_values () |
| This will be called before parsing or parameter_info is called. | |
| Static Protected Member Functions inherited from stir::RegisteredObject< Shape3D > | |
| static RegistryType & | registry () |
| Static function returning the registry. | |
| KeyParser | parser |
Detailed Description
A class for shapes that have been discretised as a volume.
Currently only supports discretisation via VoxelsOnCartesianGrid.
This class supports 2 options:
- a label-image with associated label index (an integer), suitable for multiple ROIs in a single file.
- a "weight" image, with (potentially) smooth edges, where voxel values vary between 0 and 1.
- Parameters for parsing
Discretised Shape3D Parameters:= input filename := <filename> label index := -1 ; if less than 1 (default), we will use "weights" END:=
where filename needs to specify a volume that can be read by STIR.
Constructor & Destructor Documentation
◆ DiscretisedShape3D() [1/2]
| stir::DiscretisedShape3D::DiscretisedShape3D | ( | const VoxelsOnCartesianGrid< float > & | image | ) |
Constructor that will copy the image to an internal member.
The filename member is set to "FROM MEMORY" such that parameter_info() returns somewhat useful info. This has a consequence that the object cannot be constructed from its own parameter_info(). This is in contrast with most other shapes.
References clone(), stir::DiscretisedDensity< num_dimensions, elemT >::get_origin(), and set_origin().
◆ DiscretisedShape3D() [2/2]
| stir::DiscretisedShape3D::DiscretisedShape3D | ( | const shared_ptr< const DiscretisedDensity< 3, float > > & | density_sptr | ) |
Constructor that will copy the shared_ptr image.
The filename member is set to "FROM MEMORY" such that parameter_info() returns somewhat useful info. This has a consequence that the object cannot be constructed from its own parameter_info(). This is in contrast with most other shapes.
References clone().
Member Function Documentation
◆ operator==()
|
inlineoverridevirtual |
◆ set_origin()
|
overridevirtual |
set origin of the shape
Reimplemented from stir::Shape3D.
References stir::Shape3D::get_origin(), set_origin(), and stir::Shape3D::set_origin().
Referenced by DiscretisedShape3D(), and set_origin().
◆ scale()
|
inlineoverridevirtual |
◆ is_inside_shape()
|
overridevirtual |
determine if a point is inside a non-zero voxel or not
- Warning
- For voxels at the edges, it is somewhat ill-defined if a point in the voxel is inside the shape. The current implementation will return true for every point in the voxel, even if the voxel value is .001. In particular, this means that this definition of is_inside_shape() cannot be used to find the voxel_weight. So, we have to redefine get_voxel_weight() in the present class.
Implements stir::Shape3D.
References stir::Shape3D::get_origin(), get_voxel_weight(), and is_inside_shape().
Referenced by is_inside_shape().
◆ get_voxel_weight()
|
overridevirtual |
get weight for a voxel centred around coord
- Warning
- Presently only works when coord is the centre of a voxel and voxel_size is identical to the image's voxel_size
The argument num_samples is ignored.
If get_label_index() >= 0, the weight will be 1 for those voxels whose value is equal to the label_index and zero otherwise. If get_label_index() < 0 (default), the weight will be the actual voxel value.
Reimplemented from stir::Shape3D.
References stir::Shape3D::get_origin(), get_voxel_weight(), and stir::round().
Referenced by get_voxel_weight(), and is_inside_shape().
◆ construct_volume()
|
overridevirtual |
Construct a new image from the underlying density.
If get_label_index() >= 0, the imags need to have the same characteristics, but in the other case, zoom_image is called for interpolation. The result is then scaled such that mean ROI values remain the same (at least for ROIs which avoid edges).
The argument num_samples is ignored.
Reimplemented from stir::Shape3D.
References stir::Array< num_dimensions, elemT >::begin_all(), construct_volume(), stir::Array< num_dimensions, elemT >::end_all(), stir::error(), stir::round(), and stir::zoom_image().
Referenced by construct_volume().
◆ clone()
|
overridevirtual |
Allocate a new Shape3D object which is a copy of the current one.
Implements stir::Shape3D.
References clone(), and stir::Shape3D::get_origin().
Referenced by clone(), DiscretisedShape3D(), and DiscretisedShape3D().
The documentation for this class was generated from the following files:
- /home/kris/devel/STIRdistrib/STIR/src/include/stir/Shape/DiscretisedShape3D.h
- /home/kris/devel/STIRdistrib/STIR/src/include/stir/Shape/DiscretisedShape3D.inl
- /home/kris/devel/STIRdistrib/STIR/src/Shape_buildblock/DiscretisedShape3D.cxx
Generated on Wed May 27 2026 17:04:06 for STIR by