Patlak kinetic model. More...
#include "stir/modelling/PatlakPlot.h"
Public Member Functions | |
| PatlakPlot () | |
| Default constructor (calls set_defaults()) | |
| ~PatlakPlot () override | |
| default destructor | |
| virtual void | multiply_dynamic_image_with_model_gradient (ParametricVoxelsOnCartesianGrid ¶metric_image, const DynamicDiscretisedDensity &dyn_image) const |
| Multiplies the dynamic image with the model gradient. | |
| virtual void | multiply_dynamic_image_with_model_gradient_and_add_to_input (ParametricVoxelsOnCartesianGrid ¶metric_image, const DynamicDiscretisedDensity &dyn_image) const |
Multiplies the dynamic image with the model gradient and add to original parametric_image. | |
| virtual void | get_dynamic_image_from_parametric_image (DynamicDiscretisedDensity &dyn_image, const ParametricVoxelsOnCartesianGrid &par_image) const |
| Multiplies the parametric image with the model matrix to get the corresponding dynamic image. | |
| void | apply_linear_regression (ParametricVoxelsOnCartesianGrid &par_image, const DynamicDiscretisedDensity &dyn_image) const |
| This is the common method used to estimate the parametric images from the dynamic images. | |
| void | set_defaults () override |
| Set defaults before parsing. | |
| Succeeded | set_up () override |
Functions to get parameters | |
| ModelMatrix< 2 > | get_model_matrix () const |
| Simply gets model matrix, if it has been already stored. | |
| ModelMatrix< 2 > | get_model_matrix (const PlasmaData &plasma_data, const TimeFrameDefinitions &time_frame_definitions, const unsigned int starting_frame) |
| Creates model matrix from plasma data (Must be already sorted in appropriate frames). | |
| unsigned int | get_starting_frame () const |
| Returns the frame that the PatlakPlot linearization is assumed to be valid. | |
| unsigned int | get_ending_frame () const |
| Returns the number of the last frame available. | |
| TimeFrameDefinitions | get_time_frame_definitions () const |
| Returns the TimeFrameDefinitions that the PatlakPlot linearization is assumed to be valid: ChT::Check. | |
Functions to set parameters | |
| void | set_model_matrix (ModelMatrix< 2 > model_matrix) |
| Simply set model matrix. | |
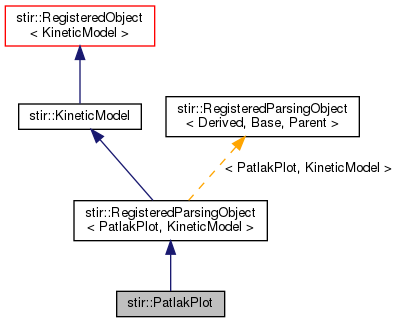
 Public Member Functions inherited from stir::RegisteredParsingObject< PatlakPlot, KineticModel > Public Member Functions inherited from stir::RegisteredParsingObject< PatlakPlot, KineticModel > | |
| std::string | get_registered_name () const override |
| Returns Derived::registered_name. | |
| std::string | parameter_info () override |
| Returns a string with all parameters and their values, in a form suitable for parsing again. | |
| std::string | get_registered_name () const override |
| Returns Derived::registered_name. | |
| std::string | parameter_info () override |
| Returns a string with all parameters and their values, in a form suitable for parsing again. | |
| Public Member Functions inherited from stir::KineticModel | |
| KineticModel () | |
| default constructor | |
| ~KineticModel () override | |
| default destructor | |
| Public Member Functions inherited from stir::ParsingObject | |
| ParsingObject (const ParsingObject &) | |
| ParsingObject & | operator= (const ParsingObject &) |
| bool | parse (std::istream &f) |
| bool | parse (const char *const filename) |
| void | ask_parameters () |
Public Attributes | |
| bool | _if_cardiac |
| Switches between cardiac and brain data. | |
| unsigned int | _starting_frame |
| Starting frame to apply the model. | |
| float | _cal_factor |
| Calibration Factor, maybe to be removed. | |
| float | _time_shift |
| Shifts the time to fit the timing of Plasma Data with the Projection Data. | |
| bool | _in_correct_scale |
| Switch to scale or not the model_matrix to the correct scale, according to the appropriate scale factor. | |
| bool | _in_total_cnt |
| Switch to choose the values of the model to be in total counts or in mean counts. | |
| std::string | _blood_data_filename |
| Name of file in which the input function is stored. | |
| PlasmaData | _plasma_frame_data |
| Stores the plasma data into frames for brain studies. | |
| std::string | _time_frame_definition_filename |
| name of file to get frame definitions | |
| TimeFrameDefinitions | _frame_defs |
| TimeFrameDefinitions. | |
Static Public Attributes | |
| static const char *const | registered_name = "Patlak Plot" |
| Name which will be used when parsing a PatlakPlot object. | |
| Static Public Attributes inherited from stir::KineticModel | |
| static const char *const | registered_name = "Kinetic Model Type" |
Additional Inherited Members | |
| Static Public Member Functions inherited from stir::RegisteredParsingObject< PatlakPlot, KineticModel > | |
| static KineticModel * | read_from_stream (std::istream *) |
| Construct a new object (of type Derived) by parsing the istream. | |
| static KineticModel * | read_from_stream (std::istream *) |
| Construct a new object (of type Derived) by parsing the istream. | |
| Static Public Member Functions inherited from stir::RegisteredObject< KineticModel > | |
| static KineticModel * | read_registered_object (std::istream *in, const std::string ®istered_name) |
| Construct a new object (of a type derived from Root, its actual type determined by the registered_name parameter) by parsing the istream. | |
| static KineticModel * | ask_type_and_parameters () |
| ask the user for the type, and then calls read_registered_object(0, type) | |
| static void | list_registered_names (std::ostream &stream) |
| List all possible registered names to the stream. | |
| Protected Types inherited from stir::RegisteredObject< KineticModel > | |
| typedef KineticModel *(* | RootFactory) (std::istream *) |
| The type of a root factory is a function, taking an istream* as argument, and returning a Root*. | |
| typedef FactoryRegistry< std::string, RootFactory, interfile_less > | RegistryType |
| The type of the registry. | |
| virtual void | set_key_values () |
| This will be called before parsing or parameter_info is called. | |
| Static Protected Member Functions inherited from stir::RegisteredObject< KineticModel > | |
| static RegistryType & | registry () |
| Static function returning the registry. | |
| KeyParser | parser |
Detailed Description
Patlak kinetic model.
Model suitable for irreversible tracers such as FDG and FLT. See
- Patlak C S, Blasberg R G, Fenstermacher J D (1985) Graphical evaluation of blood-to-brain transfer constants from multiple-time uptake data, {J Cereb Blood Flow Metab 3(1): p. 1-7.
- Patlak C S, Blasberg R G (1985) Experimental and Graphical evaluation of blood-to-brain transfer constant from multiple-time uptake data: Generalizations, J Cereb Blood Flow Metab 5: p. 584-90.
- Example .par file
Patlak Plot Parameters:= time frame definition filename := frames.txt starting frame := 23 calibration factor := 9000 blood data filename := blood_file.txt ; In seconds Time Shift := 0 In total counts := 1 end Patlak Plot Parameters:=
- Warning
- The dynamic images will be calibrated only if the calibration factor is given.
- The [if_total_cnt] is set to true the Dynamic Image will have the total number of counts while if set to false it will have the total_number_of_counts/get_duration(frame_num).
- The dynamic images will always be in decaying counts.
- The plasma data is assumed to be in decaying counts.
- Todo
- Should be derived from LinearModels, but when non-linear models will be introduced, as well.
Constructor & Destructor Documentation
◆ PatlakPlot()
| stir::PatlakPlot::PatlakPlot | ( | ) |
Default constructor (calls set_defaults())
default constructor
References PatlakPlot(), and set_defaults().
Referenced by PatlakPlot().
Member Function Documentation
◆ get_model_matrix()
| ModelMatrix< 2 > stir::PatlakPlot::get_model_matrix | ( | ) | const |
Simply gets model matrix, if it has been already stored.
Simply get model matrix if it has been already stored.
References stir::error(), and get_model_matrix().
Referenced by get_model_matrix(), and stir::modellingTests::run_tests().
◆ multiply_dynamic_image_with_model_gradient()
|
virtual |
Multiplies the dynamic image with the model gradient.
For a linear model the model gradient is the transpose of the model matrix. So, the dynamic image is "projected" from time domain to the parameter domain.
- Todo
- Should be a virtual function declared in the KineticModel class.
References _in_correct_scale, stir::error(), stir::get(), stir::DiscretisedDensityOnCartesianGrid< num_dimensions, elemT >::get_grid_spacing(), and multiply_dynamic_image_with_model_gradient().
Referenced by get_model_matrix(), and multiply_dynamic_image_with_model_gradient().
◆ multiply_dynamic_image_with_model_gradient_and_add_to_input()
|
virtual |
Multiplies the dynamic image with the model gradient and add to original parametric_image.
- Todo
- Should be a virtual function declared in the KineticModel class.
References _in_correct_scale, stir::error(), stir::get(), stir::DiscretisedDensityOnCartesianGrid< num_dimensions, elemT >::get_grid_spacing(), and multiply_dynamic_image_with_model_gradient_and_add_to_input().
Referenced by get_model_matrix(), and multiply_dynamic_image_with_model_gradient_and_add_to_input().
◆ get_dynamic_image_from_parametric_image()
|
virtual |
Multiplies the parametric image with the model matrix to get the corresponding dynamic image.
- Todo
- Should be a virtual function declared in the KineticModel class.
References _in_correct_scale, stir::error(), stir::get(), get_dynamic_image_from_parametric_image(), and stir::DiscretisedDensityOnCartesianGrid< num_dimensions, elemT >::get_grid_spacing().
Referenced by get_dynamic_image_from_parametric_image(), and get_model_matrix().
◆ apply_linear_regression()
| void stir::PatlakPlot::apply_linear_regression | ( | ParametricVoxelsOnCartesianGrid & | par_image, |
| const DynamicDiscretisedDensity & | dyn_image ) const |
This is the common method used to estimate the parametric images from the dynamic images.
- Todo
- There is currently no check if the time frame definitions from dyn_image are the same as the ones encoded in the model.
References _frame_defs, _in_correct_scale, apply_linear_regression(), stir::error(), stir::get(), stir::DiscretisedDensityOnCartesianGrid< num_dimensions, elemT >::get_grid_spacing(), and stir::linear_regression().
Referenced by apply_linear_regression(), and get_model_matrix().
◆ set_defaults()
|
overridevirtual |
Set defaults before parsing.
Reimplemented from stir::ParsingObject.
References _blood_data_filename, _cal_factor, _in_correct_scale, _in_total_cnt, _starting_frame, _time_shift, stir::ParsingObject::set_defaults(), and set_defaults().
Referenced by get_model_matrix(), PatlakPlot(), and set_defaults().
◆ set_up()
|
overridevirtual |
Implements stir::KineticModel.
The documentation for this class was generated from the following files:
- /home/kris/devel/STIRdistrib/STIR/src/include/stir/modelling/PatlakPlot.h
- /home/kris/devel/STIRdistrib/STIR/src/modelling_buildblock/PatlakPlot.cxx
Generated on Wed May 27 2026 17:04:07 for STIR by